PP究竟是如何算出来的? 剖析osu!的PP算法!
全文阅读: https://turou.fun/osu/pp-system/
本文是笔者研究osu!戳泡泡模式PP算法的一个记录文章, 旨在帮助其他对PP算法感兴趣的玩家快速建立对PP算法的认知. 由于大部分内容是笔者的个人理解和经验谈, 可能存在错误或者偏差, 欢迎读者提出改进意见和补充内容.
本文的代码片段来源于rosu-pp, rosu-pp是osu!lazer全模式算法的Rust实现, 也是目前最流行的PP计算库. 本文面向略有编程经验的读者, 读者不必深入了解Rust, 只需要具有本科级别的编程知识和数学知识即可理解本文内容.
初探PP算法
两步式计算
抛开复杂的算法不谈, 我们先来谈论一些表象. 在表面来看, PP系统会综合评估谱面难不难和打的好不好两个概念, 最终计算出一个PP数值.
广泛存在的一个误区是PP系统会根据Replay来评判这两个概念, 这是一种错误的认知. 实际上, PP计算是两步式进行的, 第一步计算谱面难度(这一步通常自变量是所有物件和速度倍率), 第二步是根据第一步算出的谱面难度和以及一些其他变量(例如谱面的三维, 玩家Acc, Miss数, 最大Combo)共同计算出最终PP数值.
不难想象, 第一步计算的时候我们主要在考虑物件之间相互影响产生的基值, 而第二步计算主要是根据玩家的表现在基值上进行倍率的调整. 这里我们举一个简单的例子, 曲奇在FDFD中取得了939PP的成绩, 而mrekk取得了926PP的成绩, Accolibed取得了640PP的成绩, 他们三人在第一步计算中算出的基值是相同的, 只是在第二步计算中产生了不同的倍率. 曲奇的准确度高于mrekk, 固取得了更高的acc_bonus. Accolibed掉了一个Miss, 固得到了miss_penalize. 最终形形色色的bonus和penalize在第二步作用在基值上, 算出了最终的数值.
也正因如此, 在利用各种PP计算器来计算大量成绩的时候, 先按照谱面归类将大幅提高计算效率, 因为在没有开启调整速度的Mod的情况下, 第一步计算(这也是决速步骤)只用进行一次就足够了.
Difficulty 与 Skills
经过上文的探究, 我们明白了Difficulty的计算是重中之重, 是区分谱面难不难的关键.
osu!的设计者们有意识地从多个维度来评估谱面的难度, 在多年的逐步迭代中明确了Skills这个概念. 当然, 针对不同的模式, Skill分别有不同维度的定义.
对于戳泡泡玩家而言, 戳泡泡模式的Skills应该至少包含了Aim和Speed这两个老生常谈的维度, 当然事实也是这样的, 可以参考下面的表格.
这里由于笔者对其他模式不甚了解, 这里我们主要将目光聚焦于osu!standard. 本文主要也将谈论Aim, Speed两个Skill.
Skill 与 微积分?
相信读者读到这里已经对Aim, Speed的具体计算非常感兴趣了, 但在正式开始之前, 我们先笼统地认识一下Skill的计算方式.
读者不妨设想一下, 对于一张时长几分钟的谱面, 我们应该如何计算他的难度呢? 实际上这个问题是困难的, 物件以时间为轴堆叠仅仅是一堆表示位置的数组, 是很难衡量困难与否的. 如果在本科期间修读过高等数学的读者可能对这个例子感到熟悉: 一个光滑的曲面本身可能是不规则的, 想要计算面积是很困难的, 但是如果将曲面无限细分, 将最小单位看作是一个正方体, 问题就很好解决了. 即整体的求解是困难的, 但是一个切片往往是容易求解的.
Skill的计算遵循了类似先微分后积分的过程, 在计算过程中, 物件被细分进行单独对待.
简单来说, 每个物件都可以算作一个表示难度的元素, 在PP系统中, 这个元素被称作是Strain. 某Skill数值的计算依托于一个Strain构成的集合. 最终Skill数值(例如: raw_aim, raw_speed), 实际上是对Strains进行积分(以某种方式累加)的结果.
戳泡泡中, 大部分Pattern(例如: 锐角跳, 钝角跳)都是针对Strain展开的, 即我们在计算单个Strain的过程中区分这些Pattern, 并给出最终的Strain值. 在实际计算Strain的过程中, 我们可以拿到很多参数辅助我们, 决定"当前物件的难度".
我们会在之后的讲解中逐步接触和理解这些概念. 在之后的讲解中, 我们也将以Strain计算为重点, 自下而上地剖析具体计算过程.
接下来, 我们将逐步探寻Aim, Speed两个Skill, 并且尝试阅读单个Strain是如何被计算的.
探索Aim Skill
在rosu-pp中, 我们可以在/osu/difficulty/skills目录找到所有Skill的定义和实现. 这里我们尝试开始阅读aim.rs的源代码
在上文的解释中, 我们已经明确了一个概念: 在计算过程中, 物件被细分进行单独对待.
所以显然,
osu_curr_obj
利用
这里很明显地, 当物件为转盘(Spinner)时, 方法将直接返回0.0, 不执行后续计算.
距离/时间=速度
这里我们解释一些基本概念, 以便于具体理解这些参数:
strain_time
表示当前物件与上一物件的时间间隔, 单位为毫秒.
计算方式为:
也可以用下面的这种方式进行计算:
对于大部分谱面, 符合下面这样的例子:
表示当前物件与上一物件的标准化距离, 单位为osu!pixel
计算方式为:
表示滑条物件的滑行距离
travel_time
表示滑条物件的滑行时间
min_jump_time
表示刨除滑行时间后, 当前物件与上一滑条头之间的时间间隔.
通常在上一物件为滑条的情形下使用, 如果上一物件不是滑条, 该值与strain_time相等.
min_jump_dist
表示刨除滑行距离后, 当前物件与上一滑条尾之间的距离.
通常在上一物件为滑条的情形下使用, 如果上一物件不是滑条, 该值与lazy_jump_dist相等.
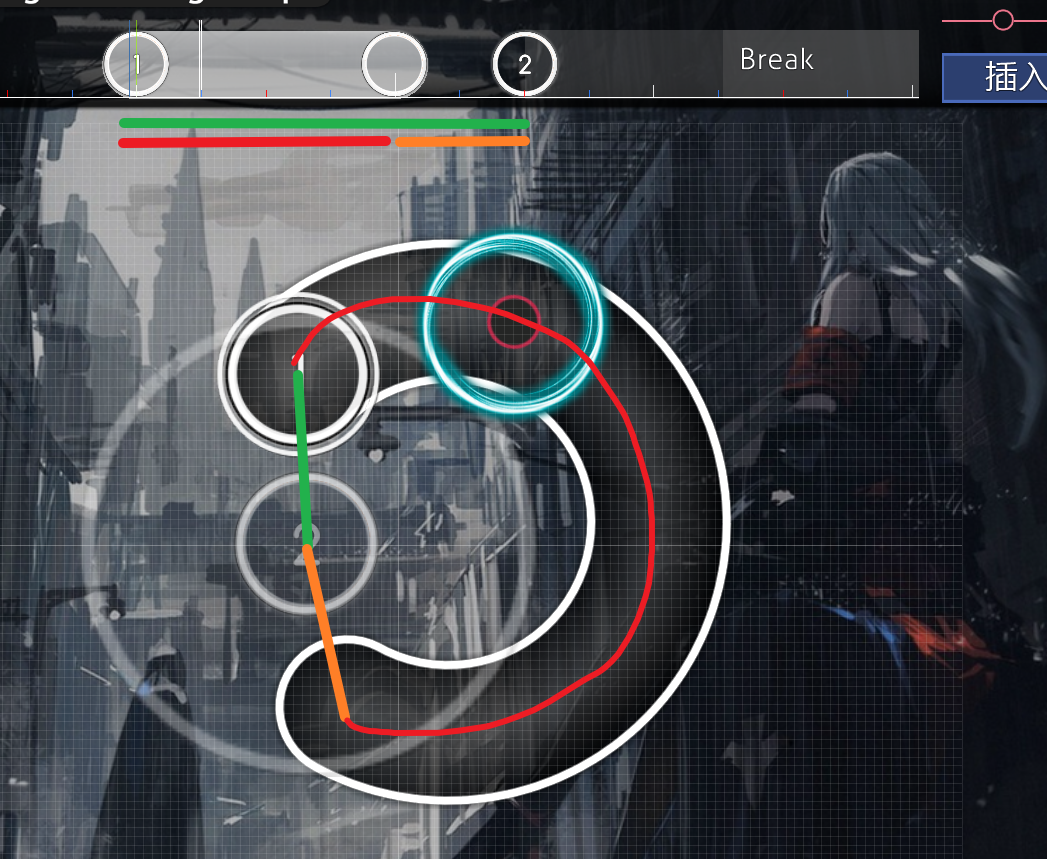
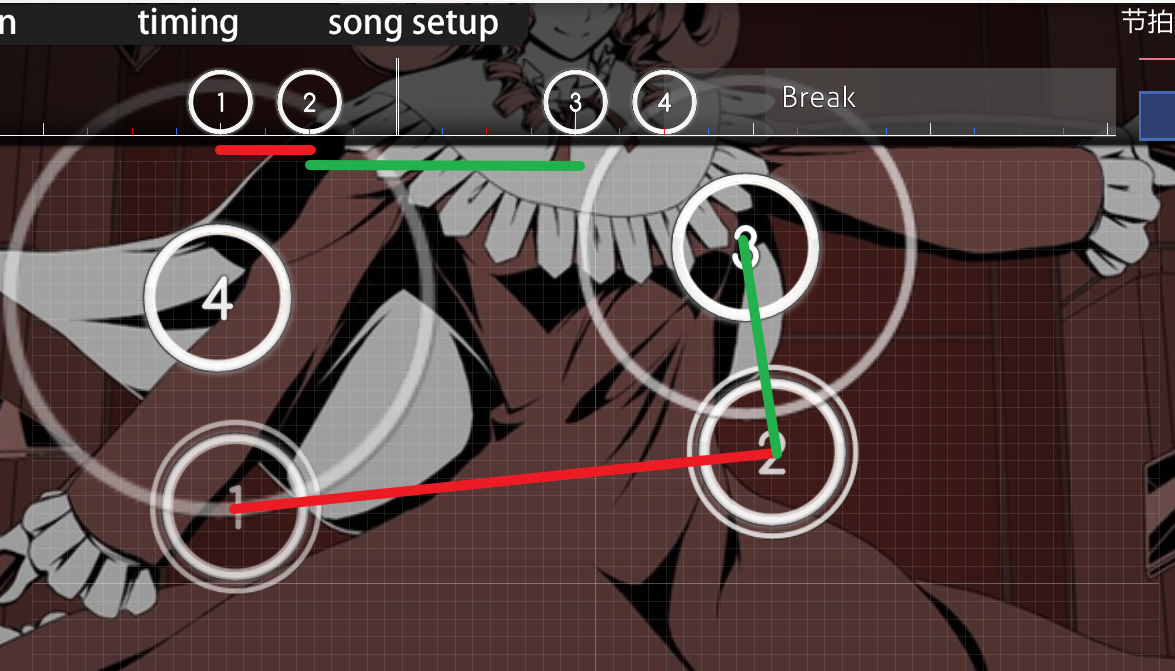
接下来我们返回到代码解析部分, 相信读者最感兴趣的就是extend velocity这部分, 我们画图来解释一下
 {width="720px"}
{width="720px"}
请读者将圆圈2当做当前物件, 很明显, 绿色的是第一步计算的
因为上一个物件是滑条, 条件满足, 这里接下来会分别计算红色部分和橘色部分的速度, 并且求和, 与原
很明显, 对于图中这种排列, 红色部分和橘色部分的速度和是大于绿色的, 故采用后续计算出的值作为
这里客观来讲, extend velocity更能表现出滑条1与圆圈2组合的速度.
锐角与广角排列
在上一部分, 我们根据速度计算出了Strain的基础值, 接下来PP算法考虑了经典的锐角和钝角Pattern, 计算出了有针对性的奖励系数.
注: 此处的代码经过了一些删减、重新排序和提取, 在不改变逻辑的情况下提升了可读性.
这里我们按照注释, 将代码分为四部分: 节奏判断、基础值计算、锐角增益计算、重复惩罚.
在最外层进行了节奏的判断, 只有符合条件的物件会得到额外的Bonus. 这里主要是锐角和广角的Bonus.
首先, 算法先保证了节奏变化幅度不大, 限制当前物件与上一物件的间隔时间变化在25%以内.
在客观角度考虑, Pattern存在的必要条件就是节奏变化幅度较小. 如果节奏变化太大就不能称为是Pattern了.
基础值计算
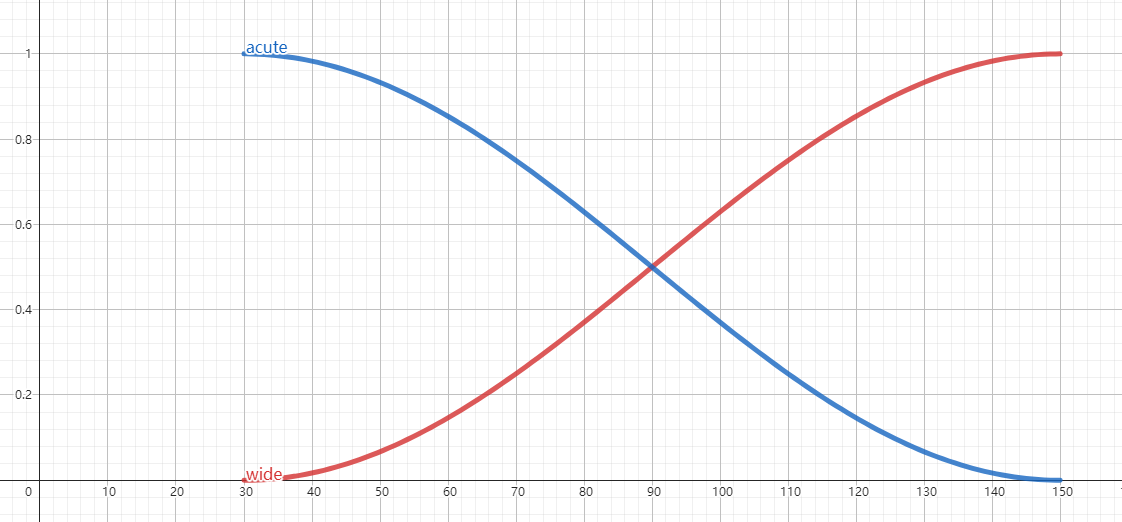
使用GeoGebra可以画出下面这样的曲线, 红线代表广角曲线, 蓝色代表锐角曲线.
 {width="720px"}
{width="720px"}
在客观角度考虑, 30度以上, 广角增益系数随角度平滑增长. 150度以下, 锐角增益系数随角度平滑增长, 是很自然的设计.
首先, 锐角增益中
这意味着大部分的排列不会吃到锐角增益. 这个结论很有意思, 也很符合逻辑. 300BPM以上的跳不必多说了.
这里150BPM的串看似几乎没有限制, 但是请读者考虑一下, 小于90度的串甚至已经进入了aim control的领域了.
首先
这里注释中提到, 只希望考虑摇摆型的锐角, 摇摆型可以理解为: 连续的几个物件都符合锐角的特征.
而偶然性的, 突发性的锐角不在增益范围, 这也是合情合理的, 这种突发性的锐角不应被视作Pattern.
接着, 对velocity, strain_time, distance分别进行了伸缩.
base1的增益范围为: 150 ~ 200BPM的串 (1/4节拍)
base2的增益范围为: 50 ~ 100单位 (互过圆心的物件 ~ 相切的物件)
重复惩罚
这里通过比较上一个Bonus, 可以间接地对重复的广角进行惩罚, 如果上一个角度更锐, 惩罚因子f(x)会减小, 从而对重复的广角施加更轻微的惩罚.
速度变化
上一部分我们针对锐角和广角排列进行了奖励, 其前提是速度相近, 即速度变化在25%以内.
下面我们将引入速度变化奖励, 这次与上文有着相反的前提, 即速度一定要有不同, 我们将采用与上一节类似的策略来分析.
这里我们按照注释, 将代码分为三部分: 比率计算、基数计算、节奏变化惩罚.
在代码的后半部分, 我们可以看到
即最终速度变化奖励是利用
首先, 针对
接下来,
速度变化的剧烈程度作为速度奖励的比率, 在合适不过了.
很明显, 这里直接使用了速度变化的大小作为基数的值.
限制可以确保在计算速度变化时, 只考虑在一定范围内的速度变化. 使奖励值更加关注较近的对象之间的速度变化, 而忽略较远对象之间的变化.
节奏变化惩罚
这里节奏变化惩罚也运用了类似的归一化手段. bonus_base(这里其实理解为penalize_base)的取值范围为[0, 1].
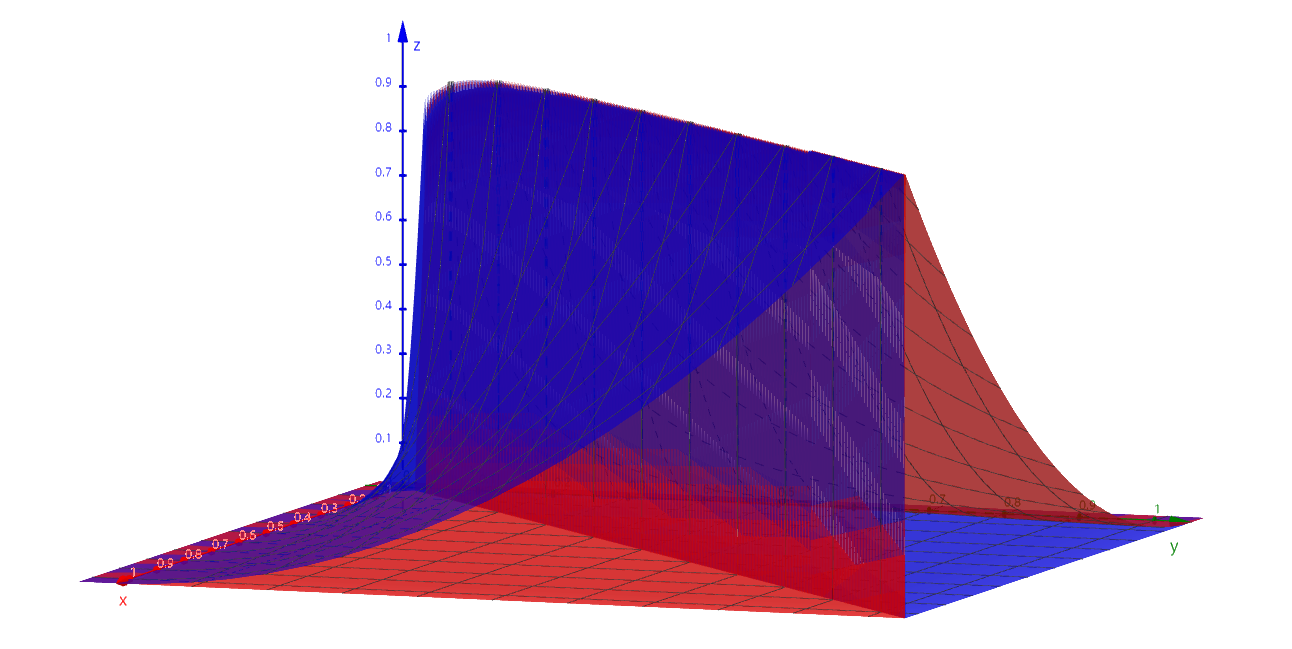
我们画出bonus_base的图象, 这里x, y轴为strain_time, z轴为bonus_base的值:
 {width="720px"}
{width="720px"}
可以明显地看到, 当strain_time不变时, 几乎没有惩罚(bonus_base值为1).
当strain_time出现变化时, 我们假定一个横纵坐标, 都有一个较小的bonus_base与其对应. 时间变化越大时, 惩罚越大.
 {width="720px"}
{width="720px"}
我们将圆圈3作为当前物件, 这里圆圈2就是上一物件, 计算圆圈3的速度变化奖励将利用二者的速度.
圆圈3的速度利用绿线计算, 属于间距小时间长, 速度必然很小.
圆圈2的速度利用红线计算, 属于间距大时间短, 速度必然很大.
在不引入时间变化惩罚的情况下, 算法将认为圆圈3的难度较高, 因为出现了较大的速度变化.
但实际上在玩家游玩中, 因为圆圈3与上一物件有较长的时间间隔, 所以已经感受不出速度变化了, 此时圆圈3的难度很低.
从另一个角度来说, 如果我们将1, 2, 3, 4的时间轴拖拽均匀, 那么这是一段较难的排列, 玩家点击圆圈3时需要一定的aim control能力.
基值 *= 奖励
首先映入我们眼帘的是一些定义好的常量 (以全大写和下划线命名), 这些常量规定了各增益在最终计算中的占比, 反应了参与计算的参数在最终数值中的权
除常量外, 还有一些计算引起了我们的兴趣, 第一是滑条奖励的计算, 是比较简单粗暴的:
这类滑条奖励主要将作用于拥有高速长滑条的一些谱面 (类似源流懐古那种), 偏Tech类的基本上增益不到.
另外,
在上文我们提过, 锐角增益的应用条件是很苛刻的 (300BPM的跳, 150BPM的串), 这也导致了大部分的物件是不会吃到锐角奖励的.
在查看常量的取值后我们发现, 针对锐角增益的乘数是大于广角增益的乘数的, 这为一些高难度、苛刻的Pattern提供了更高的奖励.
简单来说, 大部分的物件奖励值都来源于广角 + 速度的计算公式, 一些常见的谱面甚至没有机会吃到锐角奖励.
探索Speed Skill
同样的, 我们首先来关注speed.rs中, 针对Speed的ISkill实现
此处的节奏复杂度(RhythmEvaluator)就是在2021年11月 Rework由Xexxar引入的概念.
这次Rework备受关注和争议, 但一定程度上避免了Aim成为主要获取PP的方式, 将osu!从打地鼠模拟器的边缘拉了回来, 下文我们会着重介绍这部分.
SpeedEvaluator
在开始介绍SpeedEvaluator之前, 我们先对一些概念进行补充:
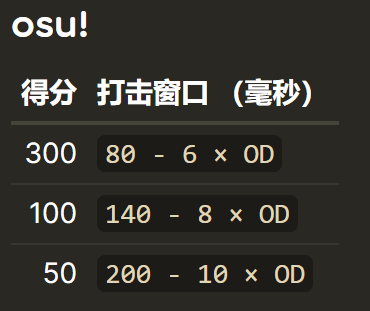
在游戏内将光标悬停在左上角的谱面三维位置可以看到窗口期(单位为ms), osu!standard模式有这样的计算方式:
算法总是需要跟随谱师的脑洞不断更新迭代, 有创新性的谱面经常能推动PP系统的更新, doubletapness就是这样被引入的
引入doubletapness源于哪张谱面呢, 请看VCR (雾):

仔细看的读者应该能发现,片段中多次出现需要双按的单拍, 这在Speed计算看来, 被判定为极高速的切, DTHR后更会使这种情况加剧.
apollo-dw的名字还会在下面的内容中出现.
速度为底、距离为因
限制
这里考虑了物件之间的间隔时间是否小于300的hitwindow, 如果小于, 就会对strain_time进行削弱.
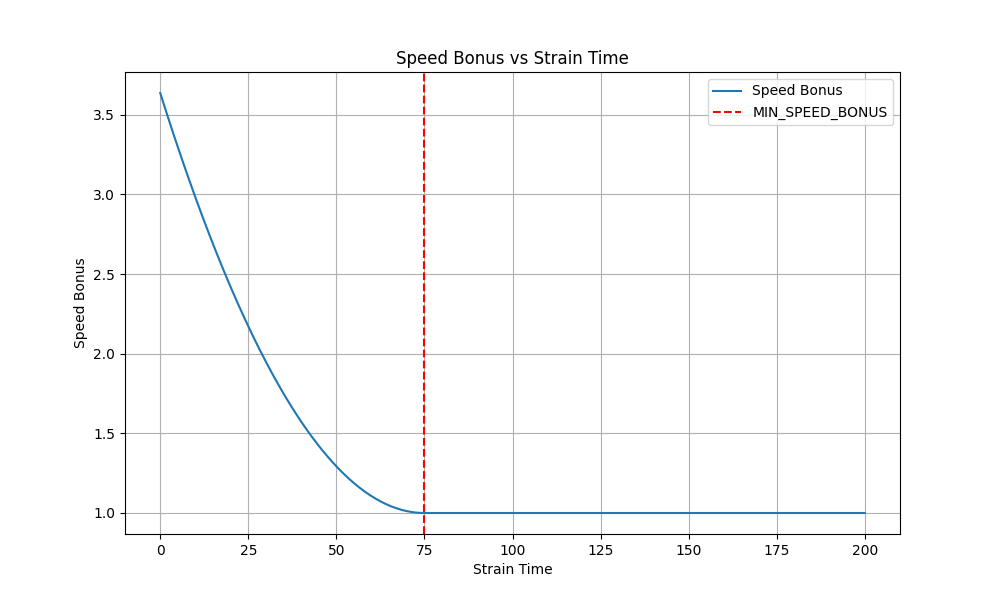
这里我们利用matplotlib绘制了
对于dist的计算, 这里与Aim中的velocity extends概念非常相似, 这里我们重新引入那张图片:
{width="720px"}
请读者将圆圈2当做当前物件, 这里圆圈2的dist就是红色距离与橙色距离的和
RhythmEvaluator
由于RhythmEvaluator较为复杂, 这里我们先对原理进行总体而粗略的解释, 再结合代码分析.
首先, RhythmEvaluator本身与上文的AimEvaluator, SpeedEvaluator无异, 都是针对具有上下文的单个物件算出的值.
节奏复杂度围绕
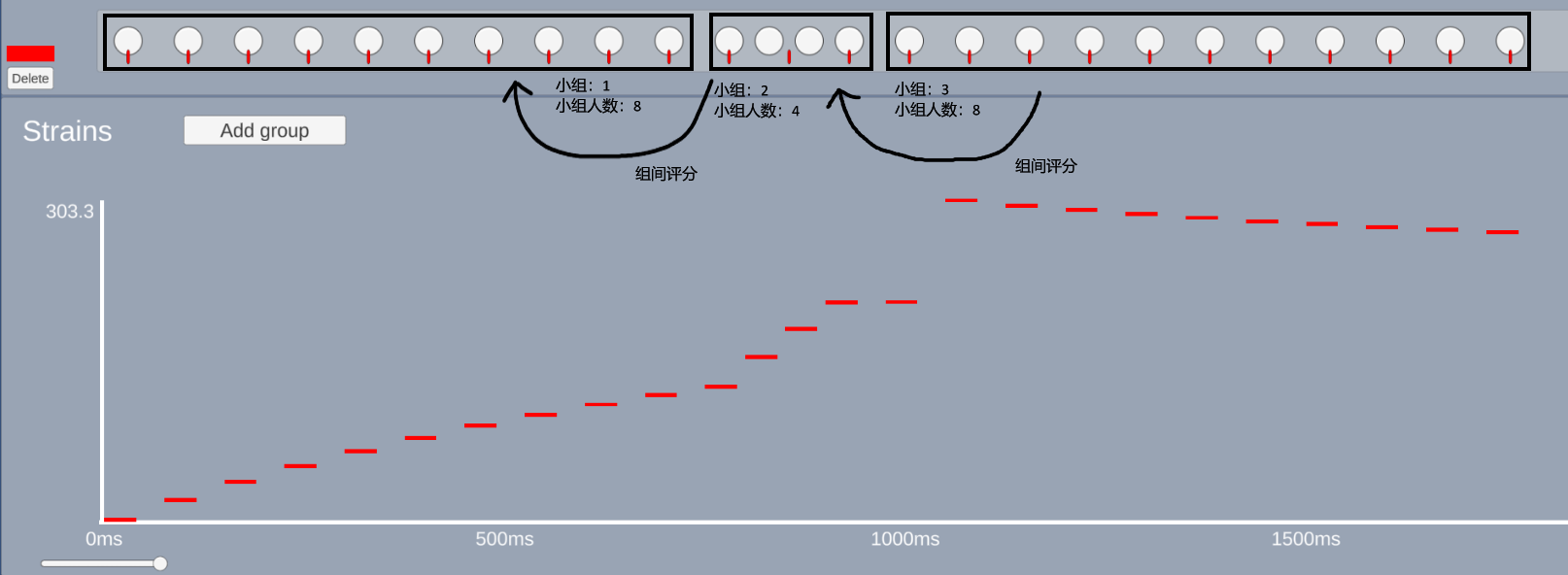
组间评分
这里, 我们利用比较通俗的语言模拟一下组间评分的过程:
首先, 先寻找当前物件5s内的0~32个历史物件, 最终会脱颖而出
接下来, 我们会按顺序遍历这些个历史物件, 尝试在遍历中对前后相邻的物件进行分组(
遍历过后, 所有的历史物件都应该被分好了自己的小组(
最后, 我们要在小组(
示意图 (图片部分来自emu1337的截图):
实现细节
接下来我们将结合代码对提到的组间评分过程进行分析, 需要注意的是, 这里为了提高可读性, 选择了C#版本的代码.
筛选对象
进行分组
首先, for循环让我们对所有的历史物件遍历, 显而易见的,
一旦满足
在下一次循环中, 由于
显然, 第二个if分支决定了分组结果, 一旦
结算的过程就是我们在上文提到的小组(
很明显地, 结算时我们有意地储存了一些previousIsland的状态, 不难理解, 这是在为下一小组结算时创建上下文
在进行分组部分的代码展示中, 我们一笔带过了
重新审视整个过程, 我们会针对每一个物件应用RhythmEvaluator, 在单一物件中提出Sum这种概念是很危险的, 我们需要将Sum平摊到每一个物件的strain上.
最简单的方式是直接将
effectiveRatio
这里我们甚至可以引用上文的原文:
组间计算
至此, 我们已经通过AimEvaluator和SpeedEvaluator探索了osu!算法的设计逻辑和具体实现. 在探究的过程中, 笔者希望读者在满足了好奇心的同时, 对于音乐类游戏的算法体系有一些简单的理解和感悟. 在行文过程中, 我们也涉及到了诸如函数拟合、归一化等统计学知识, 希望对于启发读者进行数学相关研究有帮助.
2024-07-01 至 2024-09-19, 兔肉献上.
全文阅读: https://turou.fun/osu/pp-system/
本文是笔者研究osu!戳泡泡模式PP算法的一个记录文章, 旨在帮助其他对PP算法感兴趣的玩家快速建立对PP算法的认知. 由于大部分内容是笔者的个人理解和经验谈, 可能存在错误或者偏差, 欢迎读者提出改进意见和补充内容.
本文的代码片段来源于rosu-pp, rosu-pp是osu!lazer全模式算法的Rust实现, 也是目前最流行的PP计算库. 本文面向略有编程经验的读者, 读者不必深入了解Rust, 只需要具有本科级别的编程知识和数学知识即可理解本文内容.
初探PP算法
两步式计算
抛开复杂的算法不谈, 我们先来谈论一些表象. 在表面来看, PP系统会综合评估谱面难不难和打的好不好两个概念, 最终计算出一个PP数值.
广泛存在的一个误区是PP系统会根据Replay来评判这两个概念, 这是一种错误的认知. 实际上, PP计算是两步式进行的, 第一步计算谱面难度(这一步通常自变量是所有物件和速度倍率), 第二步是根据第一步算出的谱面难度和以及一些其他变量(例如谱面的三维, 玩家Acc, Miss数, 最大Combo)共同计算出最终PP数值.
不难想象, 第一步计算的时候我们主要在考虑物件之间相互影响产生的基值, 而第二步计算主要是根据玩家的表现在基值上进行倍率的调整. 这里我们举一个简单的例子, 曲奇在FDFD中取得了939PP的成绩, 而mrekk取得了926PP的成绩, Accolibed取得了640PP的成绩, 他们三人在第一步计算中算出的基值是相同的, 只是在第二步计算中产生了不同的倍率. 曲奇的准确度高于mrekk, 固取得了更高的acc_bonus. Accolibed掉了一个Miss, 固得到了miss_penalize. 最终形形色色的bonus和penalize在第二步作用在基值上, 算出了最终的数值.
也正因如此, 在利用各种PP计算器来计算大量成绩的时候, 先按照谱面归类将大幅提高计算效率, 因为在没有开启调整速度的Mod的情况下, 第一步计算(这也是决速步骤)只用进行一次就足够了.
上文提到的误区实际上源自于玩家对算法的过度期待: Miss了简单的部分, SS了困难的部分, PP算法是无法分辨出这两个场景的. 这些场景只能被视为一个整体, 表现于上文提到的其他变量中, 影响第二步计算的各种倍率. 这也是各个PP计算器不需要提供Replay, 只需要提供最终结果, 就能计算出准确PP的原理所在.至此, 我们已经将PP计算的过程分为了两部分, 通常来说, 第一步被称为Difficulty计算, 第二步被称为Performance计算.
Difficulty 与 Skills
经过上文的探究, 我们明白了Difficulty的计算是重中之重, 是区分谱面难不难的关键.
osu!的设计者们有意识地从多个维度来评估谱面的难度, 在多年的逐步迭代中明确了Skills这个概念. 当然, 针对不同的模式, Skill分别有不同维度的定义.
对于戳泡泡玩家而言, 戳泡泡模式的Skills应该至少包含了Aim和Speed这两个老生常谈的维度, 当然事实也是这样的, 可以参考下面的表格.
- osu!standard: Aim, Speed, Flashlight
- osu!mania: Strain
- osu!catch: Movement
- osu!taiko: Color, Rhythm, Stamina
这里由于笔者对其他模式不甚了解, 这里我们主要将目光聚焦于osu!standard. 本文主要也将谈论Aim, Speed两个Skill.
Skill 与 微积分?
相信读者读到这里已经对Aim, Speed的具体计算非常感兴趣了, 但在正式开始之前, 我们先笼统地认识一下Skill的计算方式.
读者不妨设想一下, 对于一张时长几分钟的谱面, 我们应该如何计算他的难度呢? 实际上这个问题是困难的, 物件以时间为轴堆叠仅仅是一堆表示位置的数组, 是很难衡量困难与否的. 如果在本科期间修读过高等数学的读者可能对这个例子感到熟悉: 一个光滑的曲面本身可能是不规则的, 想要计算面积是很困难的, 但是如果将曲面无限细分, 将最小单位看作是一个正方体, 问题就很好解决了. 即整体的求解是困难的, 但是一个切片往往是容易求解的.
Skill的计算遵循了类似先微分后积分的过程, 在计算过程中, 物件被细分进行单独对待.
简单来说, 每个物件都可以算作一个表示难度的元素, 在PP系统中, 这个元素被称作是Strain. 某Skill数值的计算依托于一个Strain构成的集合. 最终Skill数值(例如: raw_aim, raw_speed), 实际上是对Strains进行积分(以某种方式累加)的结果.
戳泡泡中, 大部分Pattern(例如: 锐角跳, 钝角跳)都是针对Strain展开的, 即我们在计算单个Strain的过程中区分这些Pattern, 并给出最终的Strain值. 在实际计算Strain的过程中, 我们可以拿到很多参数辅助我们, 决定"当前物件的难度".
- osu_curr_obj, osu_last_obj, osu_last_last_obj: 拿到前后的物件
- travel_dist, travel_time, strain_time, jump_dist: 距离, 时间等几何量、物理量
我们会在之后的讲解中逐步接触和理解这些概念. 在之后的讲解中, 我们也将以Strain计算为重点, 自下而上地剖析具体计算过程.
接下来, 我们将逐步探寻Aim, Speed两个Skill, 并且尝试阅读单个Strain是如何被计算的.
探索Aim Skill
在rosu-pp中, 我们可以在/osu/difficulty/skills目录找到所有Skill的定义和实现. 这里我们尝试开始阅读aim.rs的源代码
impl<'a> Skill<'a, Aim> {
fn strain_value_at(&mut self, curr: &'a OsuDifficultyObject<'a>) -> f64 {
self.inner.curr_strain *= strain_decay(curr.delta_time, STRAIN_DECAY_BASE);
self.inner.curr_strain +=
AimEvaluator::evaluate_diff_of(curr, self.diff_objects, self.inner.with_sliders)
* SKILL_MULTIPLIER;
self.inner.curr_strain
}
}在针对Skill<'a, Aim>的实现中, 最吸引我们注意的是strain_value_at方法, 因为curr_strain值正是从这里发源的.在上文的解释中, 我们已经明确了一个概念: 在计算过程中, 物件被细分进行单独对待.
所以显然,
strain_value_at会被调用多次, 其参数curr表示将要被计算的某一物件, self.diff_objects是所有物件列表的一个引用.self.diff_objects的存在是必要的, 因为在计算单个物件的时候, 我们需要获取该物件的上下文. 接下来, 我们将目光放到pub trait IDifficultyObject: Sized { fn idx(&self) -> usize; fn previous<'a, D>(&self, backwards_idx: usize, diff_objects: &'a [D]) -> Option<&'a D> {} fn next<'a, D>(&self, forwards_idx: usize, diff_objects: &'a [D]) -> Option<&'a D> {} }简单阅读IDifficultyObject的定义, 相信读者已经明白idx,diff_objects的必要性和使用场景了.
AimEvaluator::evaluate_diff_of方法上, 我们将按行分块解释这个方法.osu_curr_obj
let osu_curr_obj = curr;
let Some((osu_last_last_obj, osu_last_obj)) = curr
.previous(1, diff_objects)
.zip(curr.previous(0, diff_objects))
.filter(|(_, last)| !(curr.base.is_spinner() || last.base.is_spinner()))
else {
return 0.0;
};这部分主要负责解构出osu_curr_obj, osu_last_obj, osu_last_last_obj. 利用
diff_objects和对象储存的物件ID就可以还原出上一个物件与下一个物件.这里很明显地, 当物件为转盘(Spinner)时, 方法将直接返回0.0, 不执行后续计算.
距离/时间=速度
// * Calculate the velocity to the current hitobject, which starts
// * with a base distance / time assuming the last object is a hitcircle.
let mut curr_vel = osu_curr_obj.lazy_jump_dist / osu_curr_obj.strain_time;
// * But if the last object is a slider, then we extend the travel
// * velocity through the slider into the current object.
if osu_last_obj.base.is_slider() && with_sliders {
// * calculate the slider velocity from slider head to slider end.
let travel_vel = osu_last_obj.travel_dist / osu_last_obj.travel_time;
// * calculate the movement velocity from slider end to current object
let movement_vel = osu_curr_obj.min_jump_dist / osu_curr_obj.min_jump_time;
// * take the larger total combined velocity.
curr_vel = curr_vel.max(movement_vel + travel_vel);
}
// * As above, do the same for the previous hitobject.
let mut prev_vel = osu_last_obj.lazy_jump_dist / osu_last_obj.strain_time;
if osu_last_last_obj.base.is_slider() && with_sliders {
let travel_vel = osu_last_last_obj.travel_dist / osu_last_last_obj.travel_time;
let movement_vel = osu_last_obj.min_jump_dist / osu_last_obj.min_jump_time;
prev_vel = prev_vel.max(movement_vel + travel_vel);
}
let mut wide_angle_bonus = 0.0;
let mut acute_angle_bonus = 0.0;
let mut slider_bonus = 0.0;
let mut vel_change_bonus = 0.0;
// * Start strain with regular velocity.
let mut aim_strain = curr_vel;这部分的主要逻辑是利用距离除以时间算出速度, 并且把速度当做初始aim_strain值.这里我们解释一些基本概念, 以便于具体理解这些参数:
strain_time
表示当前物件与上一物件的时间间隔, 单位为毫秒.
计算方式为:
当前物件的起始时间 - 上一物件的起始时间.也可以用下面的这种方式进行计算:
(60 / BPM) * 节拍细分 * 1000.对于大部分谱面, 符合下面这样的例子:
- 对于180BPM的跳: (60 / 180) * 1/2 * 1000 = 166.67ms.
- 对于180BPM的串: (60 / 180) * 1/4 * 1000 = 83.34ms.
- 对于200BPM的跳: (60 / 200) * 1/2 * 1000 = 150.00ms.
- 对于200BPM的串: (60 / 200) * 1/4 * 1000 = 75.00ms.
算法中规定, MIN_DELTA_TIME = 25.0, 即strain_time的最小值为25ms.lazy_jump_dist
关于节拍细分的更多内容可以查看osu!Wiki: 音符时值 (Beat Snap Divisor)
表示当前物件与上一物件的标准化距离, 单位为osu!pixel
计算方式为:
normalize(||当前物件的位置 - 上一物件的位置||)osu!pixel的区域为(0, 0)到(512, 384), 在实际游玩中会根据分辨率进行缩放.travel_dist
物件的位置会进行标准化, 标准化的时候, 取圆圈物件的半径为50单位长度, 注: 此时会考虑CS.
同时也与作图的堆叠度配置有关, 感兴趣的读者可以自行阅读相关代码
表示滑条物件的滑行距离
travel_time
表示滑条物件的滑行时间
min_jump_time
表示刨除滑行时间后, 当前物件与上一滑条头之间的时间间隔.
通常在上一物件为滑条的情形下使用, 如果上一物件不是滑条, 该值与strain_time相等.
min_jump_dist
表示刨除滑行距离后, 当前物件与上一滑条尾之间的距离.
通常在上一物件为滑条的情形下使用, 如果上一物件不是滑条, 该值与lazy_jump_dist相等.
接下来我们返回到代码解析部分, 相信读者最感兴趣的就是extend velocity这部分, 我们画图来解释一下
请读者将圆圈2当做当前物件, 很明显, 绿色的是第一步计算的
curr_vel, 接下来, 进入if逻辑的判断.因为上一个物件是滑条, 条件满足, 这里接下来会分别计算红色部分和橘色部分的速度, 并且求和, 与原
curr_vel取最大值.很明显, 对于图中这种排列, 红色部分和橘色部分的速度和是大于绿色的, 故采用后续计算出的值作为
curr_vel.这里客观来讲, extend velocity更能表现出滑条1与圆圈2组合的速度.
锐角与广角排列
在上一部分, 我们根据速度计算出了Strain的基础值, 接下来PP算法考虑了经典的锐角和钝角Pattern, 计算出了有针对性的奖励系数.
注: 此处的代码经过了一些删减、重新排序和提取, 在不改变逻辑的情况下提升了可读性.
这里我们按照注释, 将代码分为四部分: 节奏判断、基础值计算、锐角增益计算、重复惩罚.
// * If rhythms are the same (节奏判断).
if osu_curr_obj.strain_time.max(osu_last_obj.strain_time)
< 1.25 * osu_curr_obj.strain_time.min(osu_last_obj.strain_time)
{
// * Rewarding angles, take the smaller velocity as base (基础值计算).
let angle_bonus = curr_vel.min(prev_vel);
wide_angle_bonus = Self::calc_wide_angle_bonus(curr_angle);
acute_angle_bonus = Self::calc_acute_angle_bonus(curr_angle);
// * Only buff deltaTime exceeding 300 bpm 1/2 (锐角增益计算).
if osu_curr_obj.strain_time > 100.0 {
acute_angle_bonus = 0.0;
} else {
let base1 =
(FRAC_PI_2 * ((100.0 - osu_curr_obj.strain_time) / 25.0).min(1.0)).sin();
let base2 = (FRAC_PI_2
* ((osu_curr_obj.lazy_jump_dist).clamp(50.0, 100.0) - 50.0)
/ 50.0)
.sin();
// * Multiply by previous angle, we don't want to buff unless this is a wiggle type pattern.
acute_angle_bonus *= Self::calc_acute_angle_bonus(last_angle)
// * The maximum velocity we buff is equal to 125 / strainTime
* angle_bonus.min(125.0 / osu_curr_obj.strain_time)
// * scale buff from 150 bpm 1/4 to 200 bpm 1/4
* base1.powf(2.0)
// * Buff distance exceeding 50 (radius) up to 100 (diameter).
* base2.powf(2.0);
}
// * (重复惩罚)
// * Penalize wide angles if they're repeated, reducing the penalty as the lastAngle gets more acute.
wide_angle_bonus *= angle_bonus
* (1.0
- wide_angle_bonus.min(Self::calc_wide_angle_bonus(last_angle).powf(3.0)));
// * Penalize acute angles if they're repeated, reducing the penalty as the lastLastAngle gets more obtuse.
acute_angle_bonus *= 0.5
+ 0.5
* (1.0
- acute_angle_bonus
.min(Self::calc_acute_angle_bonus(last_last_angle).powf(3.0)));
}节奏判断在最外层进行了节奏的判断, 只有符合条件的物件会得到额外的Bonus. 这里主要是锐角和广角的Bonus.
首先, 算法先保证了节奏变化幅度不大, 限制当前物件与上一物件的间隔时间变化在25%以内.
在客观角度考虑, Pattern存在的必要条件就是节奏变化幅度较小. 如果节奏变化太大就不能称为是Pattern了.
基础值计算
wide_angle_bonus = Self::calc_wide_angle_bonus(curr_angle);
acute_angle_bonus = Self::calc_acute_angle_bonus(curr_angle);
fn calc_wide_angle_bonus(angle: f64) -> f64 {
(3.0 / 4.0 * ((5.0 / 6.0 * PI).min(angle.max(PI / 6.0)) - PI / 6.0))
.sin()
.powf(2.0)
}
fn calc_acute_angle_bonus(angle: f64) -> f64 {
1.0 - Self::calc_wide_angle_bonus(angle)
}接下来, 算法根据物件之间角度的数值, 计算出了广角和锐角增益的基础值, 范围为0 ~ 1.((5.0 / 6.0 * PI).min(angle.max(PI / 6.0)) - PI / 6.0) 计算了角度与π/6的偏移值.3/4 * 偏移值 是在对定义域进行伸缩, 伸缩到(30, 150).sin²(偏移值) 将结果限制到0 ~ 1之间使用GeoGebra可以画出下面这样的曲线, 红线代表广角曲线, 蓝色代表锐角曲线.
在客观角度考虑, 30度以上, 广角增益系数随角度平滑增长. 150度以下, 锐角增益系数随角度平滑增长, 是很自然的设计.
很明显地, 算法有意将30度以下的角度视作锐角, 将30度以上的角度视为广角, 我们常说的直角、钝角Pattern实际上都归属于广角的领域.锐角增益计算
首先, 锐角增益中
osu_curr_obj.strain_time > 100.0限制了只有300BPM以上的跳或者150BPM以上的串会被增益.这意味着大部分的排列不会吃到锐角增益. 这个结论很有意思, 也很符合逻辑. 300BPM以上的跳不必多说了.
这里150BPM的串看似几乎没有限制, 但是请读者考虑一下, 小于90度的串甚至已经进入了aim control的领域了.
可能有读者对 acute_angle_bonus 置为 0 有疑问, 在下文的讲解中, 这个顾虑便会消失.
实际上, 最终增益系数的值是选取锐角和广角增益的较大者, 也就说一个物件要么被认为是广角、要么被认为是锐角.
let base1 =
(FRAC_PI_2 * ((100.0 - osu_curr_obj.strain_time) / 25.0).min(1.0)).sin();
let base2 = (FRAC_PI_2
* ((osu_curr_obj.lazy_jump_dist).clamp(50.0, 100.0) - 50.0)
/ 50.0)
.sin();
// * Multiply by previous angle, we don't want to buff unless this is a wiggle type pattern.
acute_angle_bonus *= Self::calc_acute_angle_bonus(last_angle)
// * The maximum velocity we buff is equal to 125 / strainTime
* angle_bonus.min(125.0 / osu_curr_obj.strain_time)
// * scale buff from 150 bpm 1/4 to 200 bpm 1/4
* base1.powf(2.0)
// * Buff distance exceeding 50 (radius) up to 100 (diameter).
* base2.powf(2.0);这里英文注释为我们理解提供了极大便利.首先
*= Self::calc_acute_angle_bonus(last_angle), 这个操作实际上在规避"离群值".这里注释中提到, 只希望考虑摇摆型的锐角, 摇摆型可以理解为: 连续的几个物件都符合锐角的特征.
而偶然性的, 突发性的锐角不在增益范围, 这也是合情合理的, 这种突发性的锐角不应被视作Pattern.
接着, 对velocity, strain_time, distance分别进行了伸缩.
base1的增益范围为: 150 ~ 200BPM的串 (1/4节拍)
base2的增益范围为: 50 ~ 100单位 (互过圆心的物件 ~ 相切的物件)
重复惩罚
// * Penalize wide angles if they're repeated, reducing the penalty as the lastAngle gets more acute.
wide_angle_bonus *= angle_bonus
* (1.0
- wide_angle_bonus.min(Self::calc_wide_angle_bonus(last_angle).powf(3.0)));
// * Penalize acute angles if they're repeated, reducing the penalty as the lastLastAngle gets more obtuse.
acute_angle_bonus *= 0.5
+ 0.5
* (1.0
- acute_angle_bonus
.min(Self::calc_acute_angle_bonus(last_last_angle).powf(3.0)));经过逻辑分析后, 我们可以将惩罚的关键部分抽象为1.0 - f(x), f(x)的增大意味着受到更大的惩罚.这里通过比较上一个Bonus, 可以间接地对重复的广角进行惩罚, 如果上一个角度更锐, 惩罚因子f(x)会减小, 从而对重复的广角施加更轻微的惩罚.
min() 选择较小的值作为惩罚因子, 这个比较是为了确保惩罚因子不会超过wide_angle_bonus的值.速度变化
上一部分我们针对锐角和广角排列进行了奖励, 其前提是速度相近, 即速度变化在25%以内.
下面我们将引入速度变化奖励, 这次与上文有着相反的前提, 即速度一定要有不同, 我们将采用与上一节类似的策略来分析.
这里我们按照注释, 将代码分为三部分: 比率计算、基数计算、节奏变化惩罚.
if prev_vel.max(curr_vel).not_eq(0.0) {
// * (比率计算)
// * We want to use the average velocity over the whole object when awarding
// * differences, not the individual jump and slider path velocities.
prev_vel = (osu_last_obj.lazy_jump_dist + osu_last_last_obj.travel_dist)
/ osu_last_obj.strain_time;
curr_vel =
(osu_curr_obj.lazy_jump_dist + osu_last_obj.travel_dist) / osu_curr_obj.strain_time;
// * Scale with ratio of difference compared to 0.5 * max dist.
let dist_ratio_base =
(FRAC_PI_2 * (prev_vel - curr_vel).abs() / prev_vel.max(curr_vel)).sin();
let dist_ratio = dist_ratio_base.powf(2.0);
// * Reward for % distance up to 125 / strainTime for overlaps where velocity is still changing. (基数计算)
let overlap_vel_buff = (125.0 / osu_curr_obj.strain_time.min(osu_last_obj.strain_time))
.min((prev_vel - curr_vel).abs());
vel_change_bonus = overlap_vel_buff * dist_ratio;
// * Penalize for rhythm changes. (节奏变化惩罚)
let bonus_base = (osu_curr_obj.strain_time).min(osu_last_obj.strain_time)
/ (osu_curr_obj.strain_time).max(osu_last_obj.strain_time);
vel_change_bonus *= bonus_base.powf(2.0);
}比率计算在代码的后半部分, 我们可以看到
vel_change_bonus = overlap_vel_buff * dist_ratio.即最终速度变化奖励是利用
基数 * 比率的方式进行计算的, 这里我们先来看比率的计算方式.首先, 针对
prev_vel和curr_vel进行了重算, 使用了之前图1中绿色的部分作为速度值.接下来,
dist_ratio与上文计算角度奖励的方式类似, 都采用先正弦再平方的方式, 很明显地, dist_ratio的取值范围为[0, 1](prev_vel - curr_vel).abs() / prev_vel.max(curr_vel) 计算了速度变化的大小相对于最大速度的比例, 反应了速度变化的剧烈程度.速度变化的剧烈程度作为速度奖励的比率, 在合适不过了.
(a - b).abs() / a.max(b) 是一种特征缩放方式, 可以将任意量纲的数值范围缩放到 [0, 1] 区间里.{width="720px"}
这里x, y可分别看作当前物件与上一物件的速度, 而z值则为归一化后的速度变化.
上文两次提到的先正弦再平方实际上也是一种特征映射的方式, 可以将原始值 x 映射到 [0, 1] 的范围内,并且平方操作可以增强映射后的值的变化幅度.基数计算
这里考虑到的变化幅度, 读者不妨考虑正弦函数各点的斜率(导数), 其变化幅度便一目了然了.
很明显, 这里直接使用了速度变化的大小作为基数的值.
(prev_vel - curr_vel).abs() 计算了前后两个物件的速度大小的差值.(125.0 / osu_curr_obj.strain_time.min(osu_last_obj.strain_time)) 主要是限制了距离对速度的影响.限制可以确保在计算速度变化时, 只考虑在一定范围内的速度变化. 使奖励值更加关注较近的对象之间的速度变化, 而忽略较远对象之间的变化.
节奏变化惩罚
这里节奏变化惩罚也运用了类似的归一化手段. bonus_base(这里其实理解为penalize_base)的取值范围为[0, 1].
我们画出bonus_base的图象, 这里x, y轴为strain_time, z轴为bonus_base的值:
可以明显地看到, 当strain_time不变时, 几乎没有惩罚(bonus_base值为1).
当strain_time出现变化时, 我们假定一个横纵坐标, 都有一个较小的bonus_base与其对应. 时间变化越大时, 惩罚越大.
注: 因为x, y轴strain_time可以等比缩放, 这里都设置为了1方便查看.读者可能不容易理解, 为什么要针对时间变化进行惩罚呢, 这里我们举出游戏中的一个例子:
我们将圆圈3作为当前物件, 这里圆圈2就是上一物件, 计算圆圈3的速度变化奖励将利用二者的速度.
圆圈3的速度利用绿线计算, 属于间距小时间长, 速度必然很小.
圆圈2的速度利用红线计算, 属于间距大时间短, 速度必然很大.
在不引入时间变化惩罚的情况下, 算法将认为圆圈3的难度较高, 因为出现了较大的速度变化.
但实际上在玩家游玩中, 因为圆圈3与上一物件有较长的时间间隔, 所以已经感受不出速度变化了, 此时圆圈3的难度很低.
从另一个角度来说, 如果我们将1, 2, 3, 4的时间轴拖拽均匀, 那么这是一段较难的排列, 玩家点击圆圈3时需要一定的aim control能力.
基值 *= 奖励
if osu_last_obj.base.is_slider() {
// * Reward sliders based on velocity.
slider_bonus = osu_last_obj.travel_dist / osu_last_obj.travel_time;
}
// * Add in acute angle bonus or wide angle bonus + velocity change bonus, whichever is larger.
aim_strain += (acute_angle_bonus * Self::ACUTE_ANGLE_MULTIPLIER).max(
wide_angle_bonus * Self::WIDE_ANGLE_MULTIPLIER
+ vel_change_bonus * Self::VELOCITY_CHANGE_MULTIPLIER,
);
// * Add in additional slider velocity bonus.
if with_sliders {
aim_strain += slider_bonus * Self::SLIDER_MULTIPLIER;
}
aim_strain在上面的部分中, 我们已经将最终计算所需的各类奖励值和基础值计算好了, 总算要到最终计算aim_strain的时刻了.首先映入我们眼帘的是一些定义好的常量 (以全大写和下划线命名), 这些常量规定了各增益在最终计算中的占比, 反应了参与计算的参数在最终数值中的权
除常量外, 还有一些计算引起了我们的兴趣, 第一是滑条奖励的计算, 是比较简单粗暴的:
滑条距离 / 滑条时间.这类滑条奖励主要将作用于拥有高速长滑条的一些谱面 (类似源流懐古那种), 偏Tech类的基本上增益不到.
另外,
aim_strain取用锐角、广角、速度增益的方式也比较有意思, 这里是取锐角 或 广角 + 速度中的较大者.在上文我们提过, 锐角增益的应用条件是很苛刻的 (300BPM的跳, 150BPM的串), 这也导致了大部分的物件是不会吃到锐角奖励的.
在查看常量的取值后我们发现, 针对锐角增益的乘数是大于广角增益的乘数的, 这为一些高难度、苛刻的Pattern提供了更高的奖励.
简单来说, 大部分的物件奖励值都来源于广角 + 速度的计算公式, 一些常见的谱面甚至没有机会吃到锐角奖励.
探索Speed Skill
同样的, 我们首先来关注speed.rs中, 针对Speed的ISkill实现
impl<'a> Skill<'a, Speed>, 将重点放在strain_value_at方法fn strain_value_at(&mut self, curr: &'a OsuDifficultyObject<'a>) -> f64 {
self.inner.curr_strain *= strain_decay(curr.strain_time, STRAIN_DECAY_BASE);
self.inner.curr_strain +=
SpeedEvaluator::evaluate_diff_of(curr, self.diff_objects, self.inner.hit_window)
* SKILL_MULTIPLIER;
self.inner.curr_rhythm =
RhythmEvaluator::evaluate_diff_of(curr, self.diff_objects, self.inner.hit_window);
let total_strain = self.inner.curr_strain * self.inner.curr_rhythm;
self.inner.object_strains.push(total_strain);
total_strain
}经过粗略的阅读, 我们发现了此处与上文Aim计算略微不同的地方. 这里将curr_strain(speed_strain)作为基值, 而curr_rhythm作为因数, 速度与节奏复杂度相乘作为最终的值, 所以我们下文主要分为SpeedEvaluator和RhythmEvaluator两个板块此处的节奏复杂度(RhythmEvaluator)就是在2021年11月 Rework由Xexxar引入的概念.
这次Rework备受关注和争议, 但一定程度上避免了Aim成为主要获取PP的方式, 将osu!从打地鼠模拟器的边缘拉了回来, 下文我们会着重介绍这部分.
关于节奏复杂度的发展历史:接下来, 我们还是按照代码的顺序来逐个介绍每一块内容.
abraker95曾在2019年提出过一套节奏复杂度的理论: On the topic of rhythmic complexity
2019年, 社区针对节奏复杂度的理解和讨论: Rhythmic Complexity
SpeedEvaluator
在开始介绍SpeedEvaluator之前, 我们先对一些概念进行补充:
hit_window: HitWindow是完成物件打击的时间窗口期, 与谱面的OD息息相关 (注意, rosu-pp中所有提到的hit_window均为整段hit_window, 即下面的计算公式 * 2).在游戏内将光标悬停在左上角的谱面三维位置可以看到窗口期(单位为ms), osu!standard模式有这样的计算方式:
这里推荐阅读osu!Wiki: 判定严度 (Overall difficulty)单拍?双按!
算法总是需要跟随谱师的脑洞不断更新迭代, 有创新性的谱面经常能推动PP系统的更新, doubletapness就是这样被引入的
引入doubletapness源于哪张谱面呢, 请看VCR (雾):
仔细看的读者应该能发现,片段中多次出现需要双按的单拍, 这在Speed计算看来, 被判定为极高速的切, DTHR后更会使这种情况加剧.
在doubletapness引入之前, 这张图DTHR后被给予了13星的超高难度 (目前为8.66星)
// * Nerf doubletappable doubles.
if let Some(osu_next_obj) = osu_next_obj {
let curr_delta_time = osu_curr_obj.delta_time.max(1.0);
let next_delta_time = osu_next_obj.delta_time.max(1.0);
let delta_diff = (next_delta_time - curr_delta_time).abs();
let speed_ratio = curr_delta_time / curr_delta_time.max(delta_diff);
let window_ratio = (curr_delta_time / hit_window).min(1.0).powf(2.0);
doubletapness = speed_ratio.powf(1.0 - window_ratio);
}window_ratio将相邻两个物件与300的hit_window相比较. 假定N是当前物件, 如果delta(N, N-1)比300的hitwindow小, 那么在(N-2, N-1)与(N-1, N)之间可以认为存在doubletapness的情况, 这里window_ratio是doubletapness的定性参数delta_diff表明了本次间隔与下次间隔之间的差值. 这里我们以GIF中任意一个圆圈2举例, 圆圈2的该值会非常大 (2与前一个1之间间隔非常短, 而与下一个1之间间隔非常长), 如果我们转而观察任意一个圆圈1, 可以得到相同的结论. 这里我们发现delta_diff就是衡量doubletapness的定量参数speed_ratio是衰减幅度的一部分. 意在将raw_doubletapness归一化到当前量纲这里提到的300的hitwindow, 可以利用上文的公式:需要注意的是, 在2021年前后, apollo-dw推进了许多与Speed计算有关的提案, doubletapness修复只是apollo-dw伟大改革的一次未雨绸缪.2(80 - 6 * OD)计算得到, 这里的2意味着我们考虑整段hitwindow, 包含正负段
doubletapness由apollo-dw在2022年引入: Rework doubletap detection in osu!'s Speed evaluator
感兴趣的读者可以到apollo-dw提供的图形计算器自己调整参数尝试: Desmos
apollo-dw的名字还会在下面的内容中出现.
速度为底、距离为因
// * Cap deltatime to the OD 300 hitwindow.
// * 0.93 is derived from making sure 260bpm OD8 streams aren't nerfed harshly, whilst 0.92 limits the effect of the cap.
strain_time /= ((strain_time / hit_window) / 0.93).clamp(0.92, 1.0);
// * derive speedBonus for calculation
let speed_bonus = if strain_time < Self::MIN_SPEED_BONUS {
let base = (Self::MIN_SPEED_BONUS - strain_time) / Self::SPEED_BALANCING_FACTOR;
1.0 + 0.75 * base.powf(2.0)
} else {
1.0
};
let travel_dist = osu_prev_obj.map_or(0.0, |obj| obj.travel_dist);
let dist = Self::SINGLE_SPACING_THRESHOLD.min(travel_dist + osu_curr_obj.min_jump_dist);
(speed_bonus + speed_bonus * (dist / Self::SINGLE_SPACING_THRESHOLD).powf(3.5))
* doubletapness
/ strain_time在计算的开头, 我们注意到了这个对于strain_time的限制操作, 他实际来源于apollo-dw的一个commit: Remove speed caps in osu! difficulty calculation限制
strain_time的本意是防止高BPM低OD串的谱面算出过高的星数, 同时推进移除旧算法直接限制Speed值的行为.这里考虑了物件之间的间隔时间是否小于300的hitwindow, 如果小于, 就会对strain_time进行削弱.
apollo-dw与emu1337通过上面提到的doubletapness修复和限制strain_time推进了Remove speed caps in osu! difficulty calculation提案.speed_bonus是从75ms开始的(200BPM), dist是从125osu!pixel开始的, 总体趋势为速度越大, 距离越远, strain值越大.
在2024年看来, 这些提案还是非常有前瞻性的, Wooting的出现大幅提升了头部玩家的高速串能力, 旧 ~333bpm 1/4 的限制移除是大势所趋
这里我们利用matplotlib绘制了
speed_bonus关于strain_time的曲线提供给读者参考:对于dist的计算, 这里与Aim中的velocity extends概念非常相似, 这里我们重新引入那张图片:
请读者将圆圈2当做当前物件, 这里圆圈2的dist就是红色距离与橙色距离的和
RhythmEvaluator
由于RhythmEvaluator较为复杂, 这里我们先对原理进行总体而粗略的解释, 再结合代码分析.
首先, RhythmEvaluator本身与上文的AimEvaluator, SpeedEvaluator无异, 都是针对具有上下文的单个物件算出的值.
节奏复杂度围绕
effectiveRatio这个参数展开. 首先, effectiveRatio会根据初始节奏变化得到一个基值, 再通过类似组间评分的方式进行削弱.组间评分
这里, 我们利用比较通俗的语言模拟一下组间评分的过程:
首先, 先寻找当前物件5s内的0~32个历史物件, 最终会脱颖而出
rhythmStart个历史物件接下来, 我们会按顺序遍历这些个历史物件, 尝试在遍历中对前后相邻的物件进行分组(
island), 分组依据是节奏发生了较大幅度变化(deltaTime变化超出25%)遍历过后, 所有的历史物件都应该被分好了自己的小组(
island), 小组人数为1~8人. 小组可以容纳超过8个物件, 但小组人数只会被记作8最后, 我们要在小组(
island)间进行评分, 当某些Pattern出现时, effectiveRatio值会被削弱, 例如: 人数相等的小组重复出现(xxx-xxx), 前后小组人数奇偶相同(xx-xxxx)等等示意图 (图片部分来自emu1337的截图):
实现细节
接下来我们将结合代码对提到的组间评分过程进行分析, 需要注意的是, 这里为了提高可读性, 选择了C#版本的代码.
筛选对象
int historicalNoteCount = Math.Min(current.Index, 32);
int rhythmStart = 0;
while (rhythmStart < historicalNoteCount - 2 && current.StartTime - current.Previous(rhythmStart).StartTime < history_time_max)
rhythmStart++;相信这里看到rhythmStart, 读者应该并不陌生, 我们在此处完成了寻找当前物件5s内的0~32个历史物件的操作.进行分组
for (int i = rhythmStart; i > 0; i--)
{
// 省略了effectiveRatio初值的计算
if (firstDeltaSwitch)
{
if (!(prevDelta > 1.25 * currDelta || prevDelta * 1.25 < currDelta))
{
if (islandSize < 7)
islandSize++; // island is still progressing, count size.
}
else
{
// 省略了对于effectiveRatio的削弱计算
/*
将分组运算的结果累计到rhythmComplexitySum中, 后文我们会再提到
rhythmComplexitySum += Math.Sqrt(effectiveRatio * previousRatio) * currHistoricalDecay * Math.Sqrt(4 + islandSize) / 2 * Math.Sqrt(4 + previousIslandSize) / 2;
previousRatio = effectiveRatio;
*/
previousIslandSize = islandSize; // log the last island size.
if (prevDelta * 1.25 < currDelta) // we're slowing down, stop counting
firstDeltaSwitch = false; // if we're speeding up, this stays true and we keep counting island size.
islandSize = 1;
}
}
else if (prevDelta > 1.25 * currDelta) // we want to be speeding up.
{
// Begin counting island until we change speed again.
firstDeltaSwitch = true;
previousRatio = effectiveRatio;
islandSize = 1;
}
}此处的代码段省略了部分值的计算过程, 让我们聚焦于island的分组依据和分组过程.首先, for循环让我们对所有的历史物件遍历, 显而易见的,
firstDeltaSwitch是新小组产生的定性判据.一旦满足
prevDelta > 1.25 * currDelta, 即deltaTime发生了加速25%的变化时, 算法认为应该生成一个新的小组了.在下一次循环中, 由于
firstDeltaSwitch被置为true, 算法将走入第一个if分支中.显然, 第二个if分支决定了分组结果, 一旦
prevDelta > 1.25 * currDelta || prevDelta * 1.25 < currDelta条件满足, 即速度发生了较大变化时, 当前小组将结束并进行结算(else分支).结算的过程就是我们在上文提到的小组(
island)间进行评分的过程. 与伪代码描述不同的是, 在真实代码中, 分组与结算是接连完成的, 而不是先分组再结算的.很明显地, 结算时我们有意地储存了一些previousIsland的状态, 不难理解, 这是在为下一小组结算时创建上下文
另外地, 这里初值计算if (prevDelta * 1.25 < currDelta) firstDeltaSwitch = false;当速度维持上涨趋势时, 小组可以接连被创建. 当速度不再上涨时, 定性判据将被复原, 直至下一次满足prevDelta > 1.25 * currDelta
敏锐的读者可能察觉到我们上文示意图中的错误, 实际上, 单调节奏不是被分为了一个大组, 而是很多人数为1的小组.
double currHistoricalDecay = (history_time_max - (current.StartTime - currObj.StartTime)) / history_time_max; // scales note 0 to 1 from history to now currHistoricalDecay = Math.Min((double)(historicalNoteCount - i) / historicalNoteCount, currHistoricalDecay); // either we're limited by time or limited by object count. double currRatio = 1.0 + 6.0 * Math.Min(0.5, Math.Pow(Math.Sin(Math.PI / (Math.Min(prevDelta, currDelta) / Math.Max(prevDelta, currDelta))), 2)); // fancy function to calculate rhythmbonuses. double windowPenalty = Math.Min(1, Math.Max(0, Math.Abs(prevDelta - currDelta) - currObj.HitWindowGreat * 0.3) / (currObj.HitWindowGreat * 0.3)); windowPenalty = Math.Min(1, windowPenalty); double effectiveRatio = windowPenalty * currRatio;currHistoricalDecay
在进行分组部分的代码展示中, 我们一笔带过了
rhythmComplexitySum的计算, 其中引用了currHistoricalDecay这个概念.重新审视整个过程, 我们会针对每一个物件应用RhythmEvaluator, 在单一物件中提出Sum这种概念是很危险的, 我们需要将Sum平摊到每一个物件的strain上.
最简单的方式是直接将
rhythmComplexitySum 除以 rhythmStart, 但这样显然并不明智. 所以在这里引入了currHistoricalDecay.currHistoricalDecay根据相差时间进行均匀的伸缩, 把Sum值平摊到0~N个历史物件中.effectiveRatio
currRatio的表达式我们并不陌生, currRatio的函数表达形式(先正弦再平方)我们并不陌生, 与Aim中曾提到的速度变化奖励不能说毫不相干,只能说一模一样.这里我们甚至可以引用上文的原文:
(prev_vel - curr_vel).abs() / prev_vel.max(curr_vel)计算了速度变化的大小相对于最大速度的比例, 反应了速度变化的剧烈程度.
相同地, 这里也采用了先正弦再平方的方式进行因数的归一化, 有疑问的读者可以返回上文查看.
Xexxar也放出了该公式的图形计算器: Desmos
windowPenalty主要针对重叠的窗口进行惩罚, 这里的玩法类似于之前apollo-dw的doubletapness.组间计算
if (currObj.BaseObject is Slider) // bpm change is into slider, this is easy acc window
effectiveRatio *= 0.125;
if (prevObj.BaseObject is Slider) // bpm change was from a slider, this is easier typically than circle -> circle
effectiveRatio *= 0.25;
if (previousIslandSize == islandSize) // repeated island size (ex: triplet -> triplet)
effectiveRatio *= 0.25;
if (previousIslandSize % 2 == islandSize % 2) // repeated island polartiy (2 -> 4, 3 -> 5)
effectiveRatio *= 0.50;
if (lastDelta > prevDelta + 10 && prevDelta > currDelta + 10) // previous increase happened a note ago, 1/1->1/2-1/4, dont want to buff this.
effectiveRatio *= 0.125;通过简单的阅读, 我们很容易发现组间削弱的逻辑, 同时我们也逐渐意识到节奏分组的优势与可行性所在.至此, 我们已经通过AimEvaluator和SpeedEvaluator探索了osu!算法的设计逻辑和具体实现. 在探究的过程中, 笔者希望读者在满足了好奇心的同时, 对于音乐类游戏的算法体系有一些简单的理解和感悟. 在行文过程中, 我们也涉及到了诸如函数拟合、归一化等统计学知识, 希望对于启发读者进行数学相关研究有帮助.
2024-07-01 至 2024-09-19, 兔肉献上.